
Vehicle-mounted vibrator trucks remain a primary energy source for the majority of seismic surveys worldwide. (Source: Sercel)
[Editor's note: A version of this story appears in the July 2020 edition of E&P. It was originally published July 1, 2020. Subscribe to the magazine here.]
Large vehicle-mounted vibrator trucks remain the energy source of choice for the majority of seismic surveys worldwide. Analogous to echo sounding, the energy they inject deep into the ground is reflected back up to the surface by differing layers of rock, and then they are captured and processed to provide detailed 3D images of oil- and gas-bearing formations.
One of the features of the Vibroseis source is that the frequencies injected can be selected specifically to provide the best penetration to the target depth of interest and to provide the highest resolution of the final image. The energy is injected in the form of a sweep, whereby the machine vibrates from low frequencies progressively upward to higher frequencies over a period of typically between 10 and 20 seconds.
The ability to produce a wide range of frequencies with sufficient force is therefore a prerequisite for any successful system of this type. Over the last decade, in particular the ability to extend the injected seismic signal frequency farther toward the low frequencies has become an almost standard requisite for Vibroseis seismic projects, the improvement in final image definition allowing oil company geophysicists to make better decisions with regard to their drilling and production programs.
Low-frequency Vibroseis has been associated in particular with low-dwell sweeps (wherein more time is spent generating the lower frequencies than the higher frequencies) as these remain the only sweep type that allows accurate spectral control. However, there are some constraints, as force output has to be reduced at the very low frequencies to stay within the machine’s mechanical and hydraulic limitations while maintaining the shortest possible low-frequency taper (ramp-up) duration.
In addition, the low-frequency sweep starts required have been associated with levels of distortion much higher than that seen with more conventional sweeps. To make matters worse, this low-frequency distortion is poorly absorbed and represents an important source of noise on seismic records.
Therefore, it would be preferable to avoid generating it if at all possible, in particular as seismic records get noisier as a result of the current industry trend for simultaneous sources and the reduction of both the source and receiver arrays traditionally used to mitigate certain types of noise.
However, a new approach exists that is embedded in the vibrator electronics itself that is both easy to implement and use during seismic operations. Field tests performed with different vibrator models on varied terrains have confirmed its effectiveness in reducing this problematic distortion.
Harmonic distortion
Harmonic distortion produced by seismic vibrators is typically distinguished between even harmonics that are mainly due to the wave propagation in the near surface and odd harmonics that have their origins mainly in the vibrator itself. These in turn depend on the actuator design, its isolation from the truck or buggy as well as the choice of optimum hydraulic settings and maintenance. It is worth noting that phase and amplitude correspond to seismic signal quality control (QC), whereas distortion is predominantly associated with equipment QC. A higher distortion level on one specific vibrator when compared to others on a fleet will indicate a failure only of that machine that will require either adjustment or repair, while elevated levels of distortion on all vibrators generally correlate with terrain-related effects.
Vibrator control systems
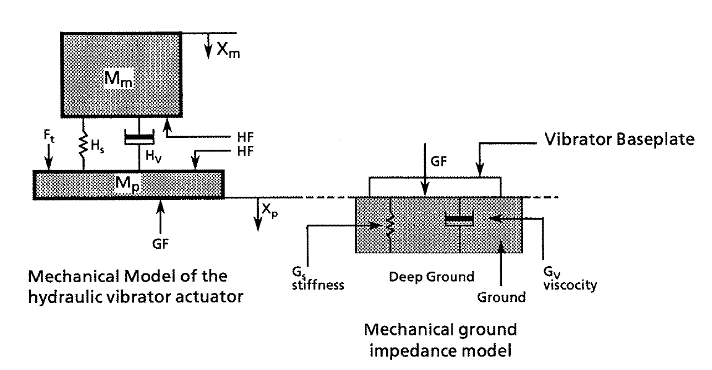
Today’s most advanced vibrator electronics are based on digital control systems that provide auto-adaptive control of the servo-mechanism. These are capable of producing digital models of both the mechanical and hydraulic components of the vibrator actuator mechanism and also of the ground itself immediately under the vehicle base plate (Figure 1).
Raw analog measurements from the accelerometers can then be compared to the state values computed by the model in a recursive process that further refines the model. In addition, Kalman predictive filtering is used as a means of effectively removing noise and inconsistencies between sensors that are inherent in the analog portion of the system.
The end result is an optimal representation of the system state at any given instant. This is then used, as in classical feedback, to derive the input signal for the vibrator actuator servo drive, so as to properly control the flow of hydraulic oil and ensure that the vibratory sweep produced is as close as possible to that desired.
It is of interest to note that advanced forms of this type of control system architecture are employed to control the flight stability of inherently aerodynamically unstable combat aircraft designs allowing them to have a combination of both stealth and high maneuverability.
Low-frequency distortion reduction
In the new approach, the vibrator control systems software modeling process has been further improved to better take into account the various sources of low-frequency distortion. Based on this improved model, the servo control is able to predict the low-frequency distortion in advance such that the servo valve input signal can be modified accordingly and the generation of the harmonics mitigated. The vibrator electronics model quickly anticipates and corrects the intrinsic behavior of the vibrator system to guarantee the injected signal is as close as possible to that desired.
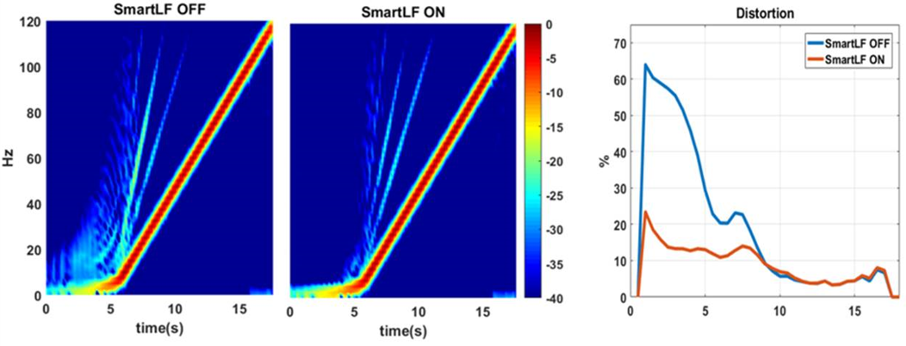
The overall ground force signal at low frequencies is effectively cleaner and all ranks of harmonics are reduced with most of the low-frequency (<15 Hz) distortion being removed (Figure 2). As an added benefit, and as is not the case with other techniques, no compromises have to be made with either phase and fundamental signal amplitude performance. Because the desired reference signal does not need to be modified, a single reference can be used for all vibrators for the subsequent processing (correlation), thus reducing the complexity and chance of error associated with the vibrator-dedicated references required by certain distortion mitigation techniques used in the past.
SmartLF can be seamlessly installed in industry standard VE464 vibrator control electronics and requires no modifications to the vibrators nor the installation of any additional mechanical component. It is easy to set up during seismic crew start of operations and does not call for any knowledge or expertise.
Several field tests have demonstrated the effectiveness of SmartLF with vibrators from various manufacturers and including super-heavy (80,000 pound force [lbf]) vibrators and heavy (62,000 lbf) models.
This new form of vibrator control is currently being deployed in combination with the latest seismic acquisition systems. Those include systems that use the latest third-generation microelectromechanical digital sensors rather than traditional moving coil geophones and are capable of measuring noise-free signals with true amplitude and phase down to frequencies of 1Hz or even less.
Recommended Reading

Southeast Asia NatGas Projects Could Unlock $100B Boom- Rystad
2024-07-17 - Southeast Asia's offshore gas industry is set for a $100 billion boom by 2028, driven by a flurry of final investment decisions by oil and gas majors and national oil companies, according to Rystad Energy.

E&P Highlights: July 1, 2024
2024-07-01 - Here’s a roundup of the latest E&P headlines, including the Israeli government approving increased gas export at the Leviathan Field and Equinor winning a FEED contract for the all-electric Fram Sør Field.

The EPC Market Keeps Its Head Above Water
2024-08-06 - While offshore investments are rising, particularly in deepwater fields, challenges persist due to project delays and inflation, according to Westwood analysis.

BP Takes FID on US GoM Development Kaskida
2024-07-30 - BP has taken a final investment decision on its Kaskida development in the U.S. GoM, with production of 80,000 bbl/d expected to start flowing in 2029.

Shell Offshore Takes FID on Waterflood Project in GoM
2024-08-14 - Shell Offshore’s waterflood secondary recovery process involves injecting water into the reservoir formation to extract oil.
Comments
Add new comment
This conversation is moderated according to Hart Energy community rules. Please read the rules before joining the discussion. If you’re experiencing any technical problems, please contact our customer care team.