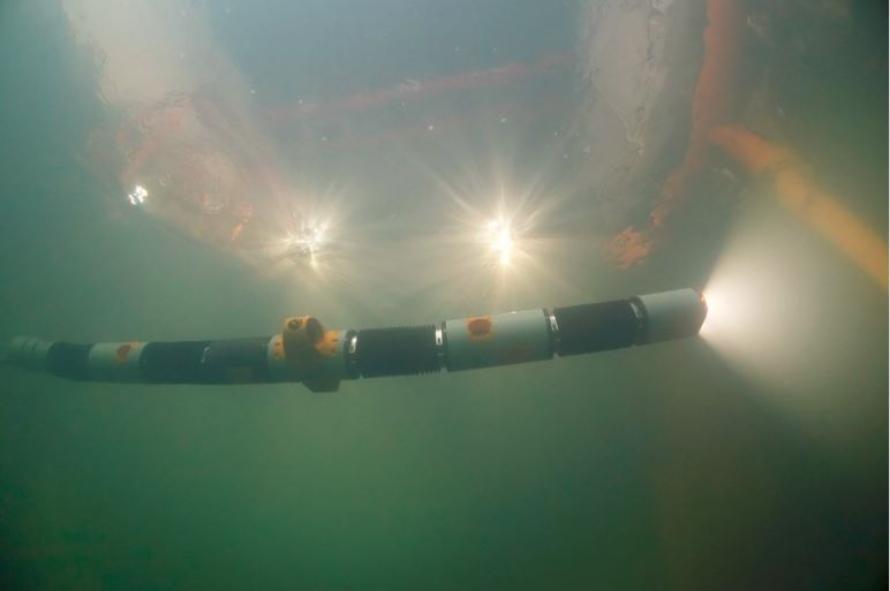
Eelume is developing another version of its snake-like underwater robotic intervention vehicle. (Source: Eelume)
Eelume’s robotic sea snake, a new underwater intervention vehicle, is moving closer to becoming commercially deployed after taking a 150-m (492-ft) winter dive in a Norwegian fjord near Trondheim, proving its abilities to maneuver, record video and snap photos.
Since testing carried out in November and December 2016, the Norwegian underwater robotics company has been hard at work further developing the slender robot with snake-like swimming movements that could revolutionize the subsea inspection, maintenance and repair (IMR) sector in tight spaces.
“We are building a new vehicle right now that will go even deeper and be able to operate tools subsea,” Eelume CEO Arne Kjørsvik said. “The plan is to make the vehicle available on the market late-2019.”
The next version of the robot will be capable of diving down to 500 m (1,640 ft), proving the concept of the technology’s self-propelled robotic arms in performing IMR jobs. The efforts of Eelume, formed in 2015 as a spinoff company from the Norwegian University of Science and Technology (NTNU), are progressing as the oil and gas industry continues to bounce back from a downturn that forced companies to find less expensive and more operationally efficient ways of working.
Developers at Eelume believe that’s exactly what the robotic snake is capable of doing for both new and existing fields.
“We are quite sure that our solution will bring a lot of value to the offshore market by reducing IMR costs,” Kjørsvik said.
The robot would carry out inspections and light intervention work on the seabed, where it will be permanently installed and beckoned whenever a job arises. As described by Eelume, the robot:
- Is a modular system with a tether module and camera swivel model on one end, which is connected by joint modules to forward and lateral thrusters;
- Features a camera, lights and other tools on the opposite side. Among the tools are a grabber, torque tool, cleaning tool and sonar;
- Can travel over long distances and operate without umbilical; and
- Allows for sensors and tools to be mounted anywhere on its body.

“Eelume will definitely save the oil companies money by providing a subsea resident ready for operation 24/7. No need for mobilization of surface vessels to operate an ROV to conduct IMR tasks since Eelume is preinstalled close to subsea installations with all the necessary tools available,” Kjørsvik said. “It is also possible to utilize this vehicle in other industries like wind farms, fisheries, etc.—reusing the technology is great for everyone.”
As reported by Hart Energy's Subsea Engineering News in April 2016, Kongsberg Maritime and Statoil signed an agreement to hasten the introduction of the underwater robotics technology for subsea applications. The technology is the result of more than 10 years’ worth of research between NTNU and the Trondheim-headquartered SINTEF research company.
At the time, Statoil’s Chief Technology Officer Elisabeth Birkeland Kvalheim called the new technology a good example of how innovation can lower costs.
“Instead of using large and expensive vessels for small jobs, we now introduce a flexible robot acting as a self-going janitor on the seabed,” Kvalheim said. “To support smaller companies in bringing new technology to the market is an important part of our research portfolio.”
Since introducing the robot, Kjørsvik said the company has received much feedback and interest from several different sectors.
Many believe autonomous vehicles will have added responsibilities in the years to come.
“In the future, we will see several tasks conducted by autonomous vehicles preinstalled on the seabed,” Kjørsvik said. “It is likely that some operations need humans in the loop in order to secure the operation; however, it will be more and more autonomous. Robots will, in general, execute risky and costly operations safer and at less cost.”
But for now, Eelume remains focused on its sole product: developing the concept and delivering the “world’s first subsea resident snake-like underwater robot.”
Editor’s note: This article originally appeared in the March 23 issue of Subsea Engineering News.

Recommended Reading

Santos’ Pikka Phase 1 in Alaska to Deliver First Oil by 2026
2024-04-18 - Australia's Santos expects first oil to flow from the 80,000 bbl/d Pikka Phase 1 project in Alaska by 2026, diversifying Santos' portfolio and reducing geographic concentration risk.
Iraq to Seek Bids for Oil, Gas Contracts April 27
2024-04-18 - Iraq will auction 30 new oil and gas projects in two licensing rounds distributed across the country.

Vår Energi Hits Oil with Ringhorne North
2024-04-17 - Vår Energi’s North Sea discovery de-risks drilling prospects in the area and could be tied back to Balder area infrastructure.

Tethys Oil Releases March Production Results
2024-04-17 - Tethys Oil said the official selling price of its Oman Export Blend oil was $78.75/bbl.

Exxon Mobil Guyana Awards Two Contracts for its Whiptail Project
2024-04-16 - Exxon Mobil Guyana awarded Strohm and TechnipFMC with contracts for its Whiptail Project located offshore in Guyana’s Stabroek Block.